

")
All'interno della Smart Road che ENEA ha realizzato al Centro Ricerche Casaccia (Roma), nell’ambito del programma “Ricerca di Sistema Elettrico” (RSE) finanziato dal Ministero dell’Ambiente e della Sicurezza Energetica, sensori di ultima generazione montati su veicoli elettrici sono in grado di rilevare le condizioni del manto stradale.
Sensori di ultima generazione montati su veicoli elettrici, sia a guida autonoma che umana, in grado di monitorare la città, rilevando lo stato del manto stradale. Li ha messi a punto il Laboratorio ENEA di Robotica e intelligenza artificiale per il progetto Smart Road nell’ambito del programma “Ricerca di Sistema Elettrico” finanziato dal Ministero dell’Ambiente e della Sicurezza Energetica.
«L’idea di base è quella di veicoli a guida autonoma che fungano da sensori per misurare in modo capillare le condizioni della città e migliorare la sicurezza, i flussi di traffico e il comfort di guida, con benefici anche in termini di risparmio energetico e sostenibilità», spiega Sergio Taraglio, ricercatore ENEA del Laboratorio di Robotica e intelligenza artificiale del Dipartimento Tecnologie energetiche e fonti rinnovabili, e responsabile di questa linea di attività.
Per l’analisi dello stato del manto stradale sono stati messi a punto due diversi sensori: il primo utilizza un LIDAR (Light Detection and Ranging), basato su laser, per misurare con notevole precisione le distanze geometriche, mentre il secondo consiste in una telecamera montata frontalmente sul veicolo che analizza il flusso video con tecniche di Intelligenza Artificiale.
«I dati raccolti dagli strumenti servono a valutare lo stato del manto stradale. Nel caso del LIDAR si misura geometricamente il piano stradale, rivelandone le deviazioni quali buche o dossi e indicando su un display il difetto stradale in rosso rispetto al colore verde di una strada in buone condizioni, potendo operare come un ADAS (Advanced Driver Assistance Systems, sistemi avanzati di assistenza alla guida)», prosegue Taraglio.
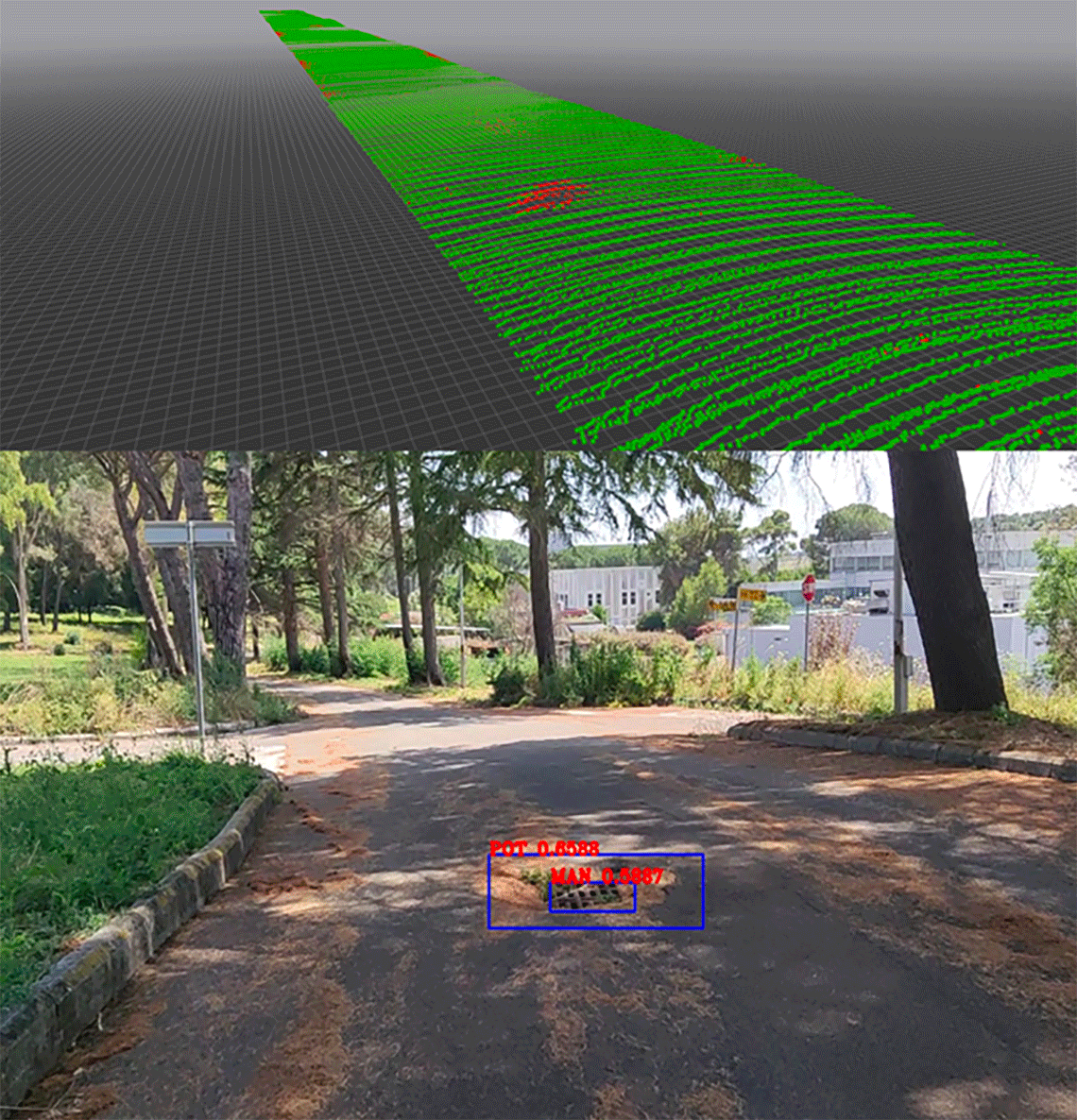 Il secondo sensore utilizza una rete neurale profonda addestrata a individuare e riconoscere i difetti nel flusso video della telecamera. Esso permette di vedere oggetti non misurabili dal LIDAR quali ad esempio le fessurazioni a reticolo o tutti quei difetti riconducibili ad elementi “pitturati” sull’asfalto (strisce pedonali o linee di carreggiata sbiadite). Entrambi i sensori lavorano in tempo reale e possono essere utilizzati per il monitoraggio urbano: le informazioni sul difetto stradale, georeferenziate, sono inviate al gestore della smart city per mappare le condizioni stradali e pianificare eventuali riparazioni.
Il secondo sensore utilizza una rete neurale profonda addestrata a individuare e riconoscere i difetti nel flusso video della telecamera. Esso permette di vedere oggetti non misurabili dal LIDAR quali ad esempio le fessurazioni a reticolo o tutti quei difetti riconducibili ad elementi “pitturati” sull’asfalto (strisce pedonali o linee di carreggiata sbiadite). Entrambi i sensori lavorano in tempo reale e possono essere utilizzati per il monitoraggio urbano: le informazioni sul difetto stradale, georeferenziate, sono inviate al gestore della smart city per mappare le condizioni stradali e pianificare eventuali riparazioni.
Inoltre, il veicolo elettrico a guida autonoma utilizzato per la sperimentazione è anche equipaggiato con un sensore di qualità dell’aria che registra le concentrazioni di particolato e invia dati per elaborare in tempo reale mappe degli inquinanti ad alta risoluzione. È attualmente in corso lo sviluppo di sistemi per l’analisi del contesto sonoro.
«L’obiettivo è duplice: da un lato misurare l’inquinamento sonoro, dall’altro permettere al veicolo autonomo di poter utilizzare le informazioni sonore per la gestione di situazioni di potenziale pericolo: ad esempio in caso di avvicinamento di un mezzo di soccorso, il veicolo deve essere in grado di riconoscere la situazione e liberare la carreggiata per quanto possibile», conclude Taraglio.



{kind=link}